
Dipayan Dhar
Computer Engineering Student
Computer Engineering Student

I'm a second-year computer engineering student at the Memorial University of Newfoundland. I'm interested in robotics and software development, and have been pursuing those goals since high school. I’m especially interested in how software can interface with hardware, with project experience ranging from programming control systems for ROVs to developing Python tools that visualize and process real-world data. I always strive to improve my skills, gaining experience through professional work, and exploring new ideas through personal projects.

September 2024 – Present
• Term 3 Computer Engineering, Class of 2029
• GPA: 4.00
• Member of Software Team in Paradigm Engineering
September 2021 – June 2024
• Graduated with Bronze Governor General’s Academic Medal
• Programming Lead of Gonzaga Robotics Team (Viking Industries)
• Founder of Coding and Advanced Math Society
• Youth STEM Workshop Leader for Creators of Tomorrow Initiative
May 2025 – Aug 2025 · St. John’s, NL, Canada
Jan 2022 – Jun 2024 · St. John’s, NL, Canada
Nov 2023 – Jun 2024 · St. John’s, NL, Canada
Jul 2022 – Aug 2022 · St. John’s, NL, Canada

Personal website to display my experience and projects.
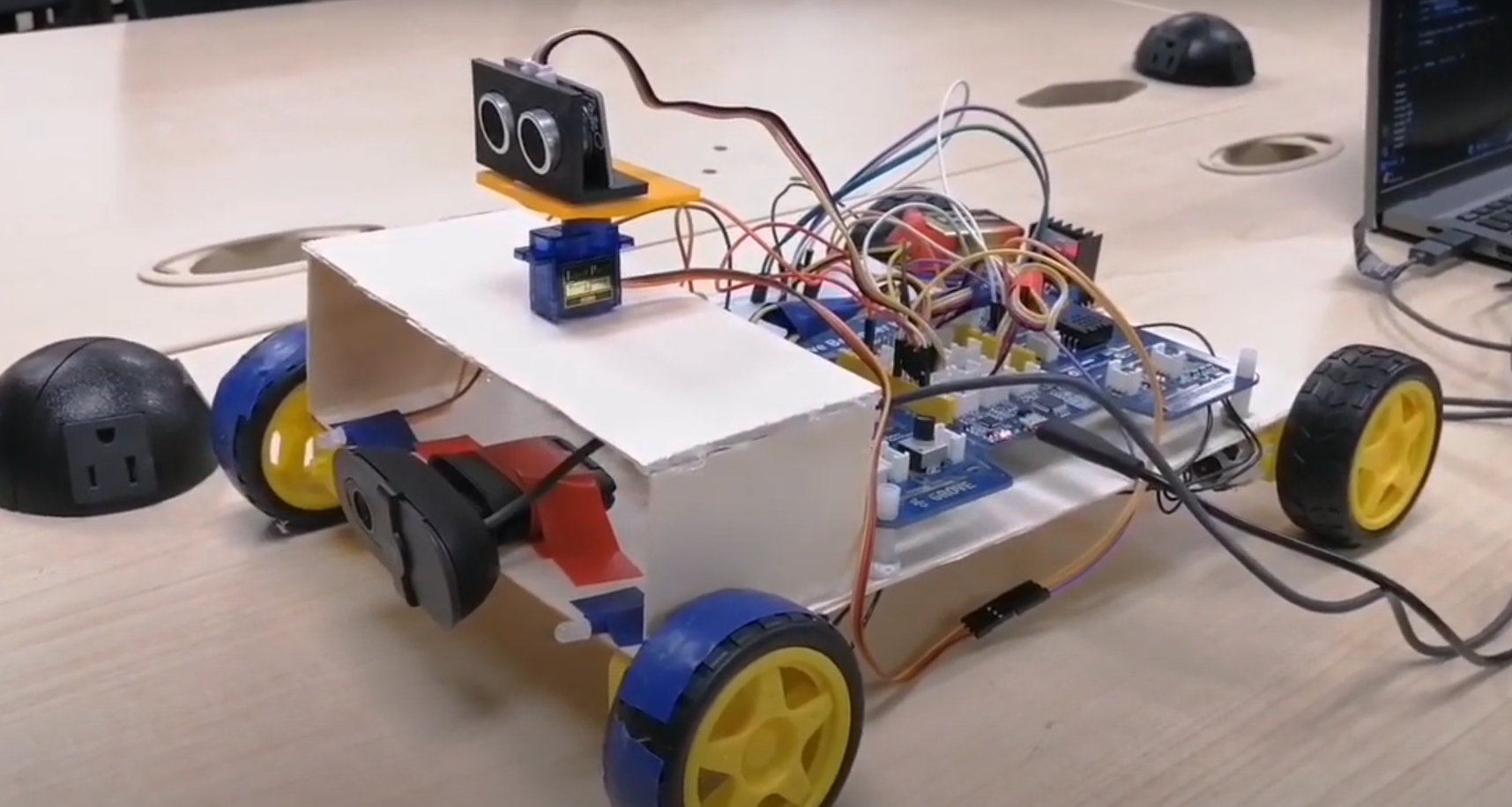
Final project for Introduction to Programming course.
Final project for Engineering Graphics and Design course.
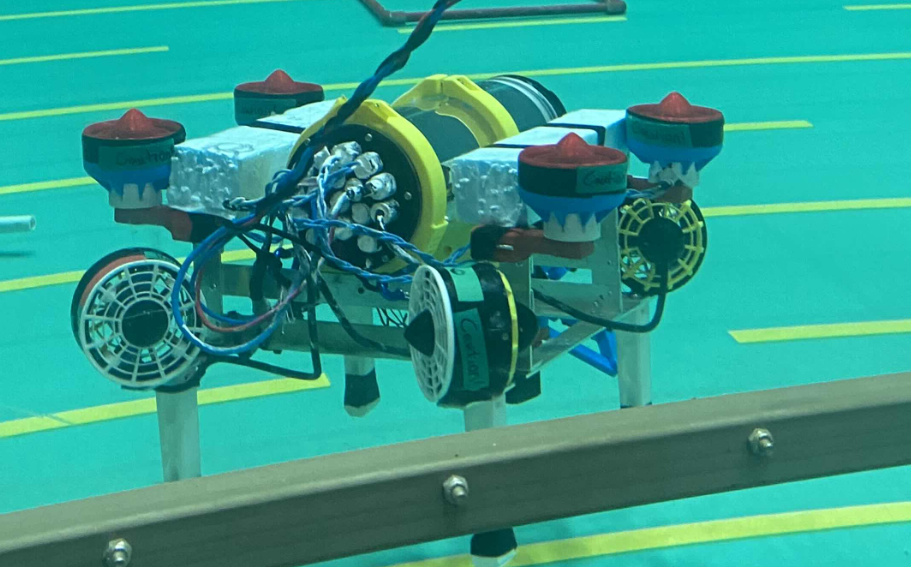
Pilot and control systems for Viking Industries ROVs.
Produces 50 MCQ for AP Physics 1 exam practice.
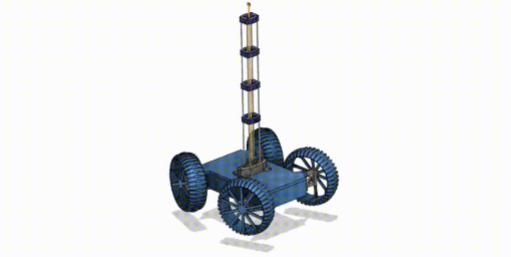
Arctic boring robot concept for HackFrost 4.0 Hackathon.
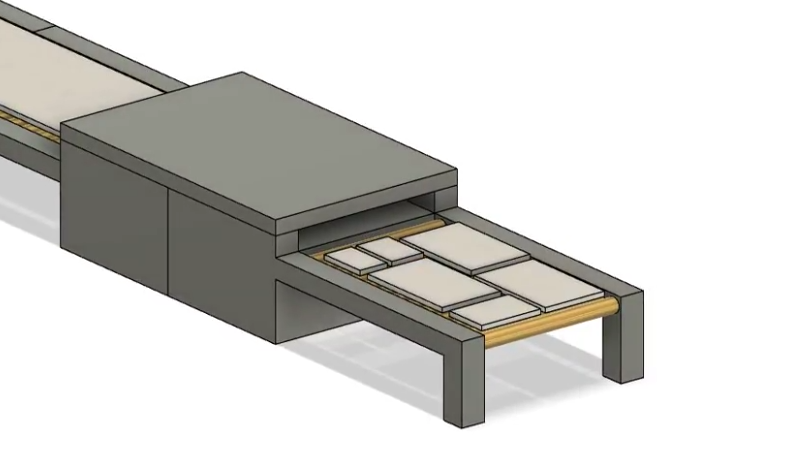
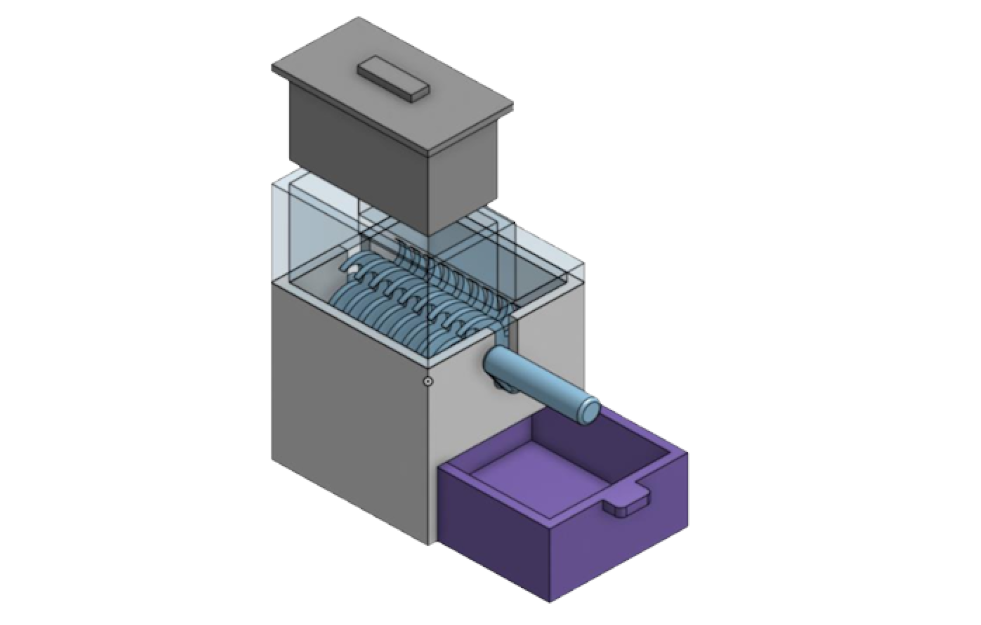
Automatic box cutter concept for HackFrost 3.0 Hackathon.
Platformer game produced for Keyin College Python course.
